



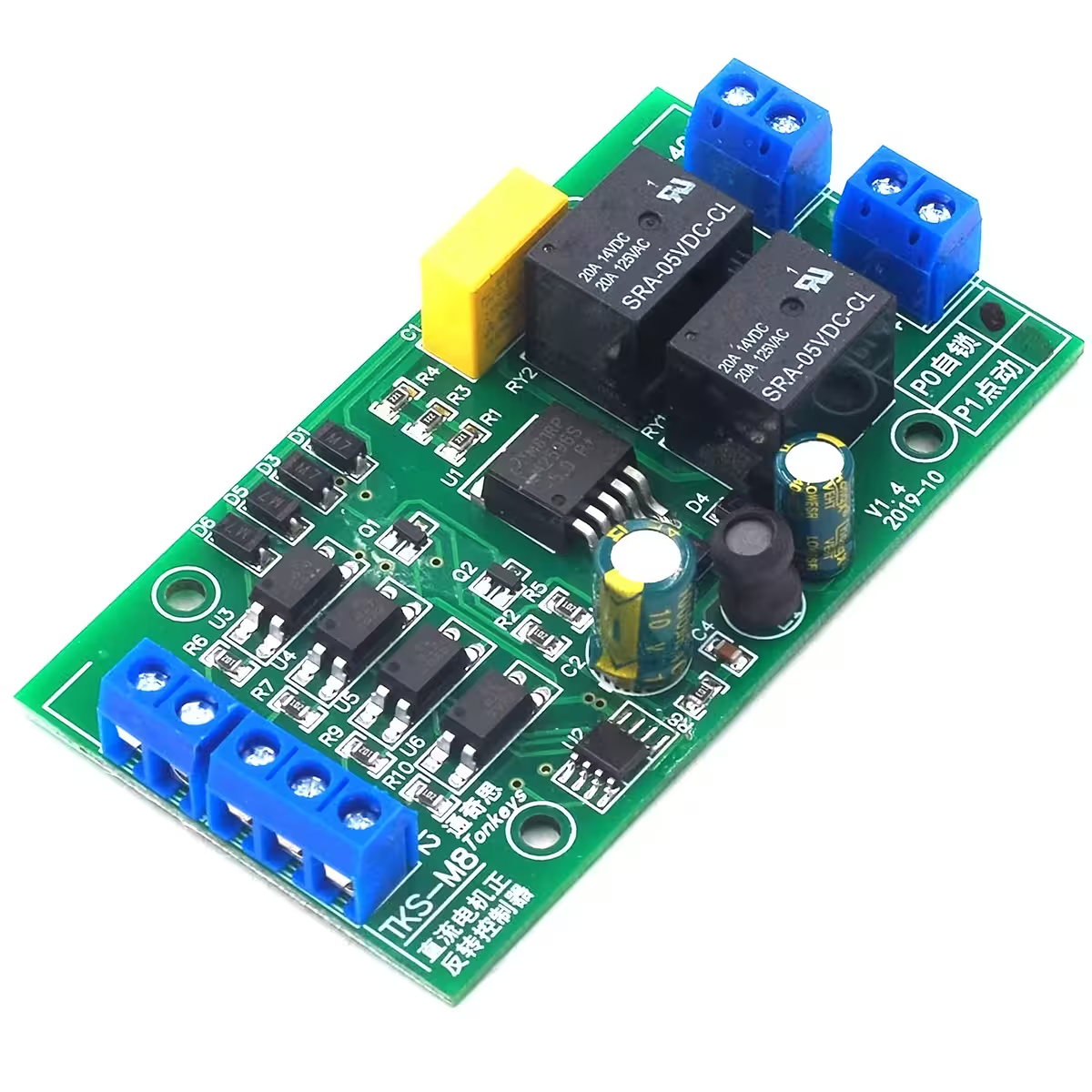
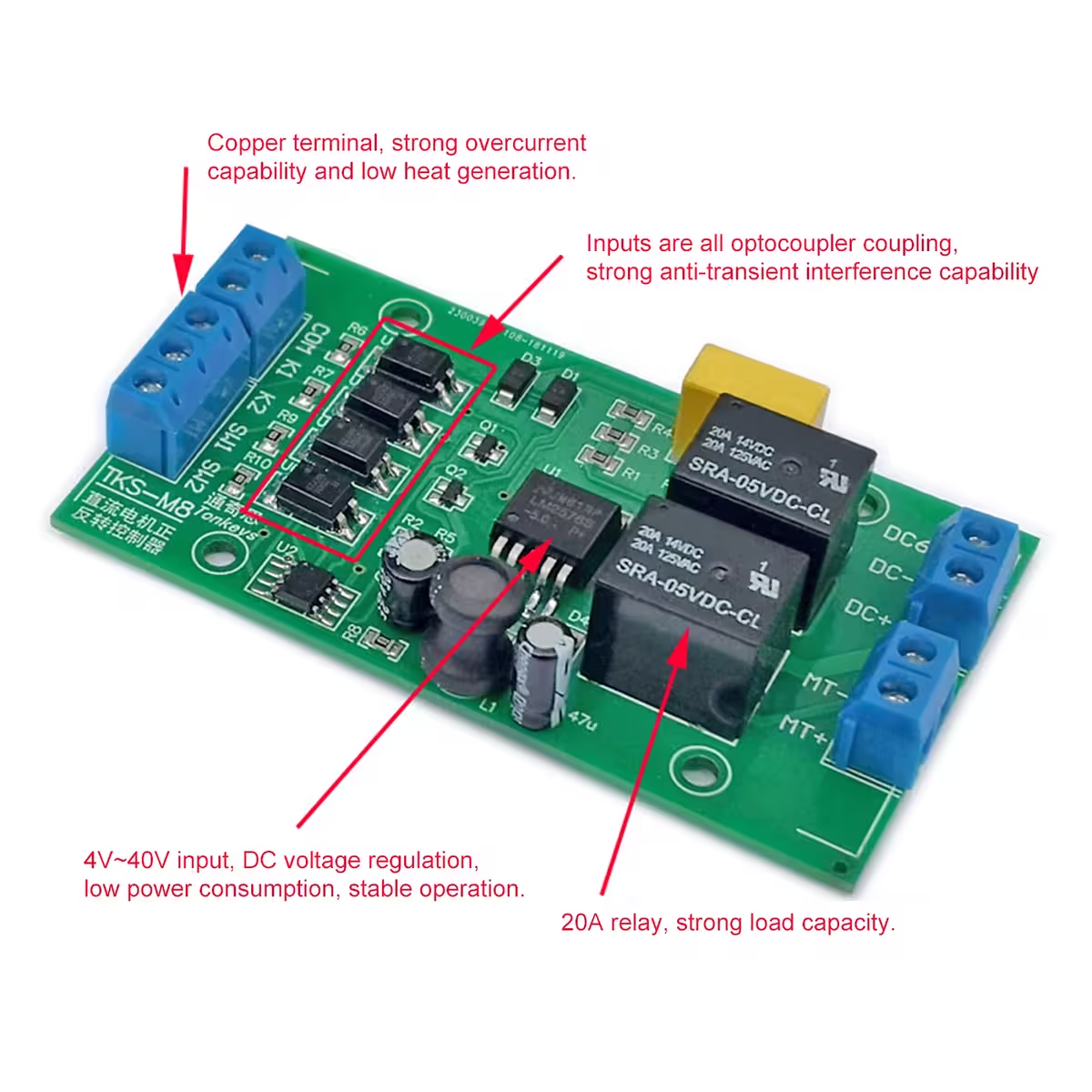
Sterownik kierunku obrotów silnika DC – precyzyjne sterowanie bez dodatkowych komponentów
Budujesz siłownik liniowy, mechanizm rewersyjny lub projekt DIY wymagający zmiany kierunku pracy silnika? Zamiast budować skomplikowane układy oparte na przekaźnikach, tranzystorach i plątaninie kabli, postaw na gotowe rozwiązanie. Ten kompaktowy sterownik silnika DC pozwala na pełną kontrolę ruchu – wystarczy podłączyć zasilanie, silnik oraz przyciski sterujące, aby system był gotowy do pracy w kilka minut.
Uwaga: Silnik otrzymuje napięcie równe napięciu zasilania sterownika. Moduł nie posiada wbudowanej regulacji napięcia wyjściowego.
Dlaczego warto wybrać ten model? (Kluczowe zalety):
- Szeroki zakres napięć: 4–40V DC — bezproblemowa współpraca z akumulatorami LiPo, zasilaczami laboratoryjnymi czy przemysłowymi.
- Wydajność prądowa do 20A — obsługa silników o dużym prądzie rozruchowym, odpowiedni dla obciążeń do ok. 80W.
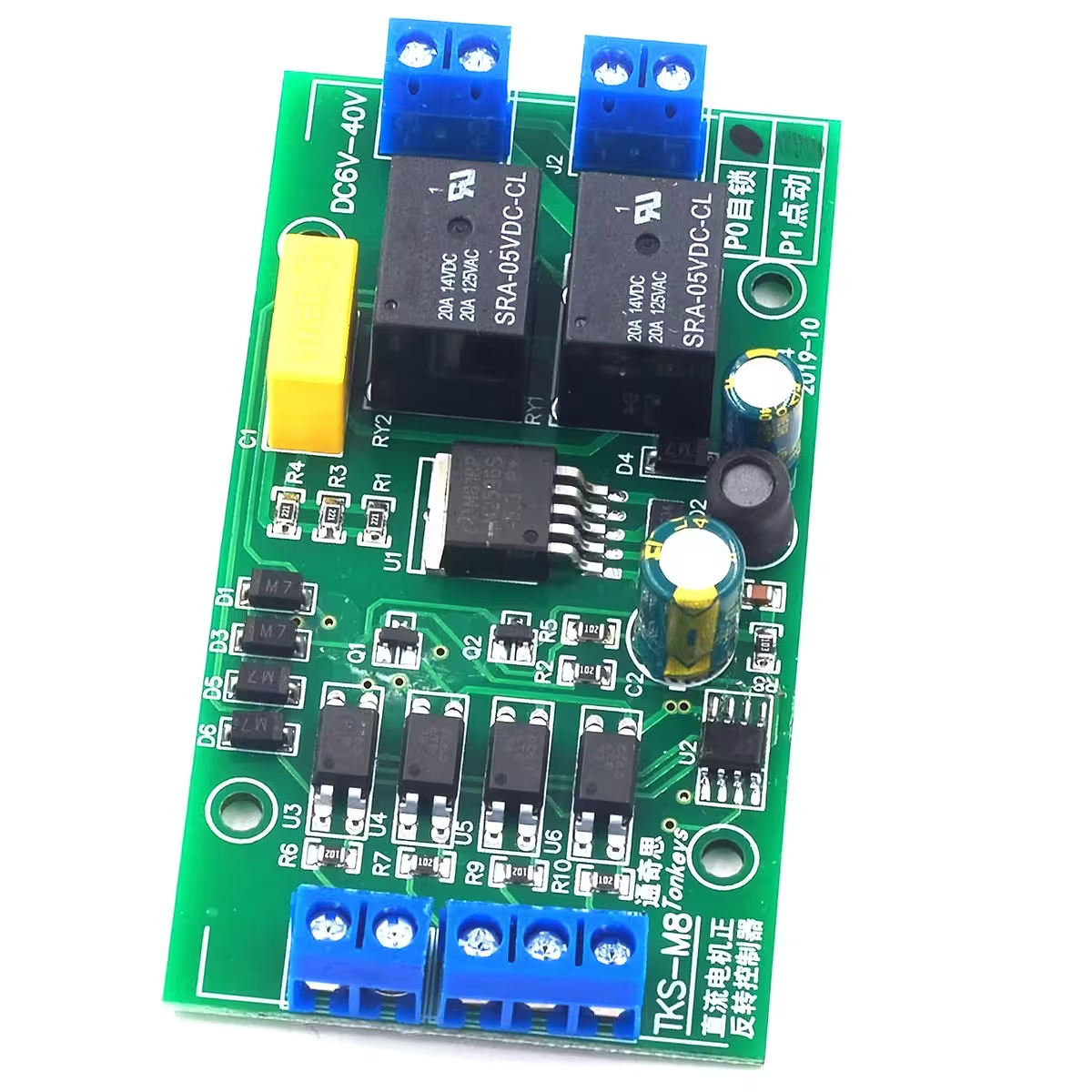
- Dwa tryby pracy: PO i P1 — wybierz między trybem samopodtrzymania (start krótkim impulsem) a trybem jog (praca tylko podczas trzymania przycisku).
- Uniwersalne wejścia active-low — bezpośrednie podłączenie zwykłych przycisków, wyłączników krańcowych NO lub czujników NPN 3-przewodowych bez dodatkowych rezystorów.
- Zintegrowane wejścia krańcówek SW1/SW2 — automatyczne zatrzymanie w skrajnych położeniach, co chroni mechanizm przed zablokowaniem lub przeciążeniem.
- Wysoka trwałość >150.000 cykli — niezawodność w codziennych, powtarzalnych zastosowaniach.
- Niski pobór mocy: 0,6W (praca) / 0,1W (czuwanie) — minimalny wpływ na zużycie energii w systemach zasilanych bateryjnie.
Szczegóły techniczne i wydajność
Sterownik wykorzystuje architekturę active-low: wejście aktywuje się, gdy napięcie na nim spadnie poniżej 2V. Dzięki temu zwykłe przyciski, wyłączniki krańcowe NO (normalnie otwarte) oraz czujniki NPN-NO można podłączyć bezpośrednio do modułu.
Czas reakcji wynosi ≈20ms dla komend K1/K2 oraz ≈50ms dla krańcówek SW1/SW2 — zapewnia to szybką reakcję przy zachowaniu stabilności i odporności na zakłócenia.
Przy wyższych napięciach zalecamy ostrożność: przy 12V sterownik obsługuje do 20A, natomiast przy 24V zaleca się ograniczenie do ok. 10A dla zapewnienia optymalnych warunków termicznych. Pamiętaj o zastosowaniu odpowiednio dobranego bezpiecznika oraz przewodów o przekroju dostosowanym do obciążenia.
| Parametr | Wartość / Szczegóły |
|---|---|
| Napięcie pracy | DC 4–40V (zalecane 6–36V) |
| Maks. prąd wyjściowy | do 20A (przy 12V) |
| Zalecana moc silnika | do ok. 80W |
| Pobór mocy (praca) | ok. 0,6W |
| Pobór mocy (czuwanie) | ok. 0,1W |
| Typ sygnału wejściowego | Active-low (aktywacja poniżej 2V) |
| Czas reakcji K1/K2 | ≈ 20ms |
| Czas reakcji SW1/SW2 | ≈ 50ms |
| Tryby pracy | PO (samopodtrzymanie) / P1 (jog) |
| Trwałość | >150.000 cykli |
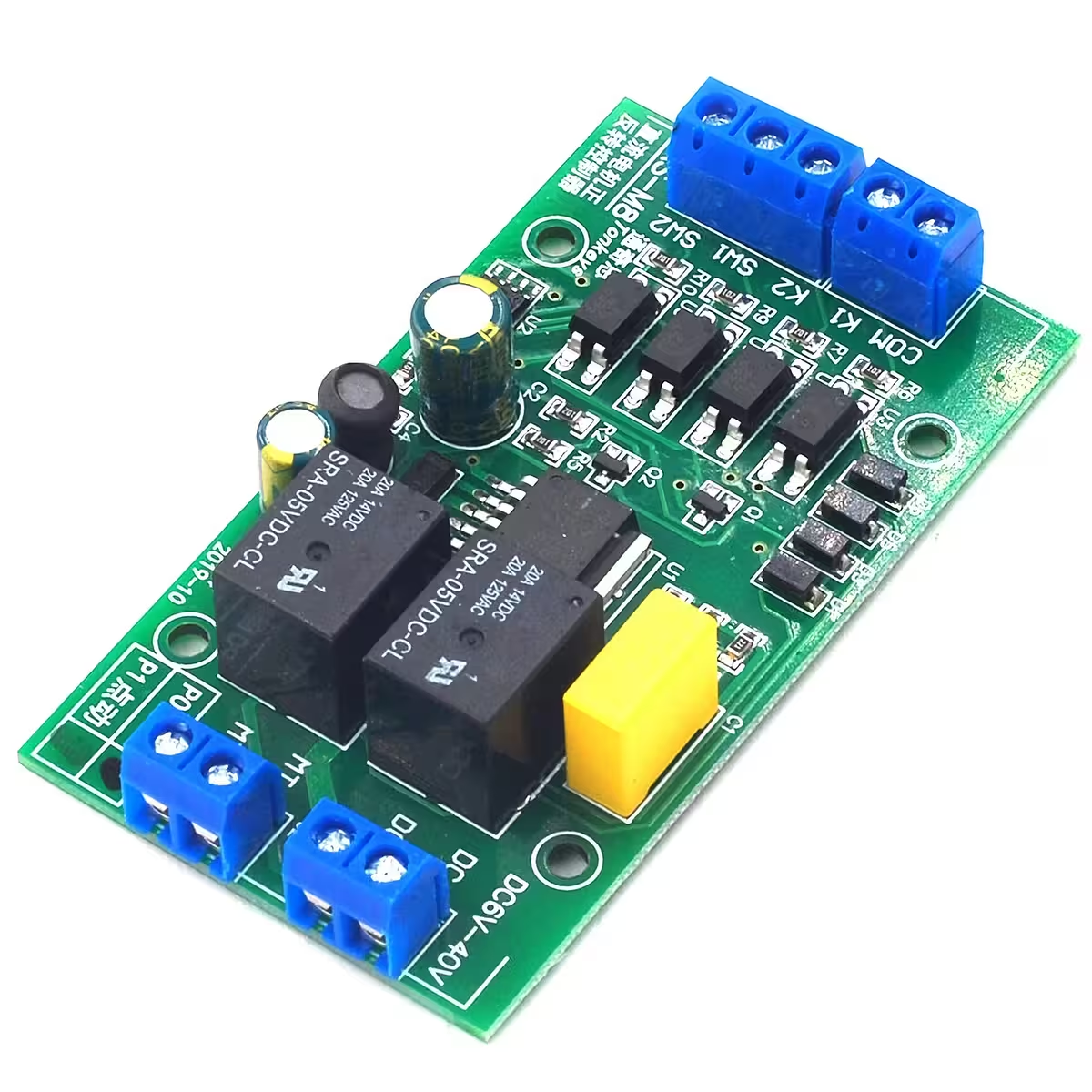
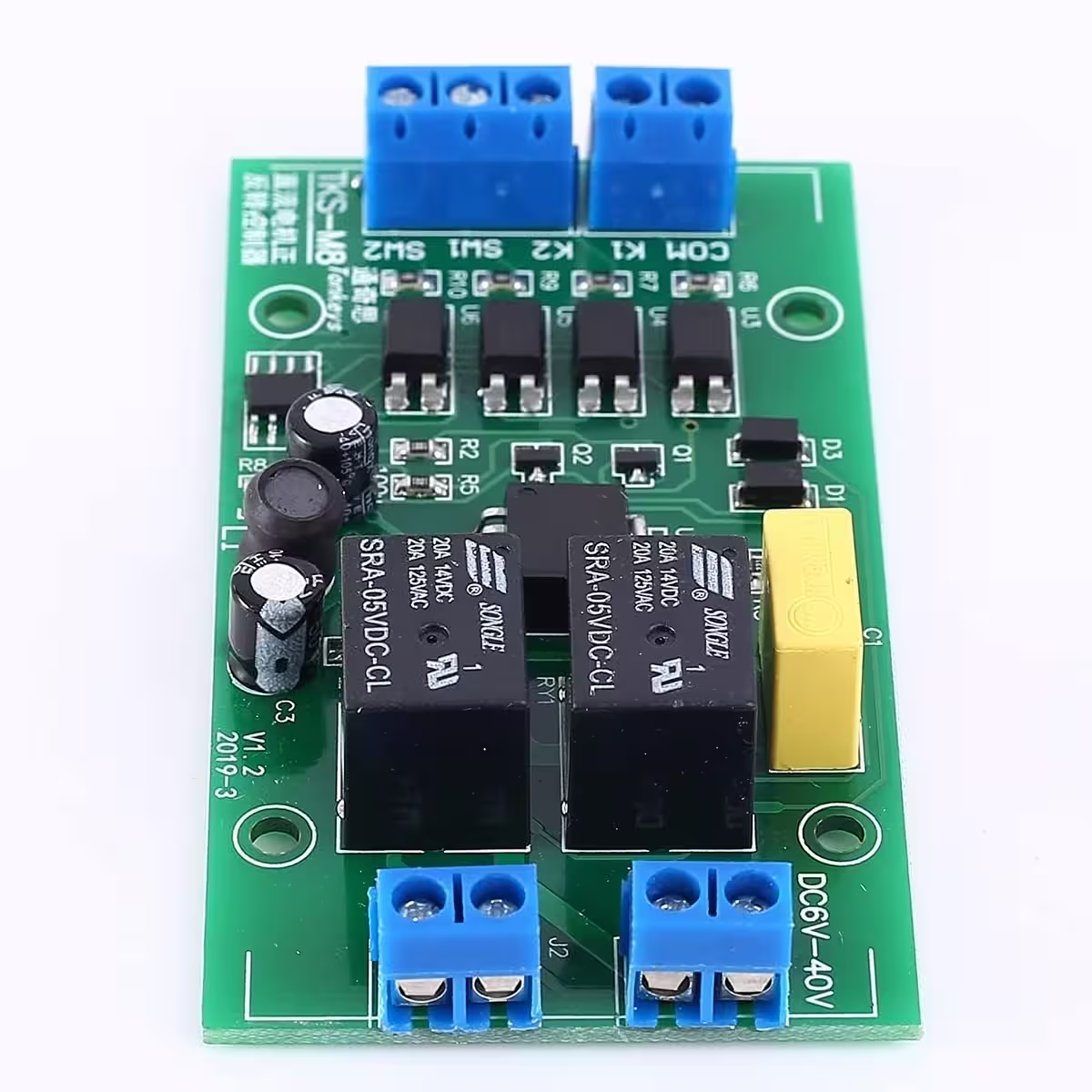
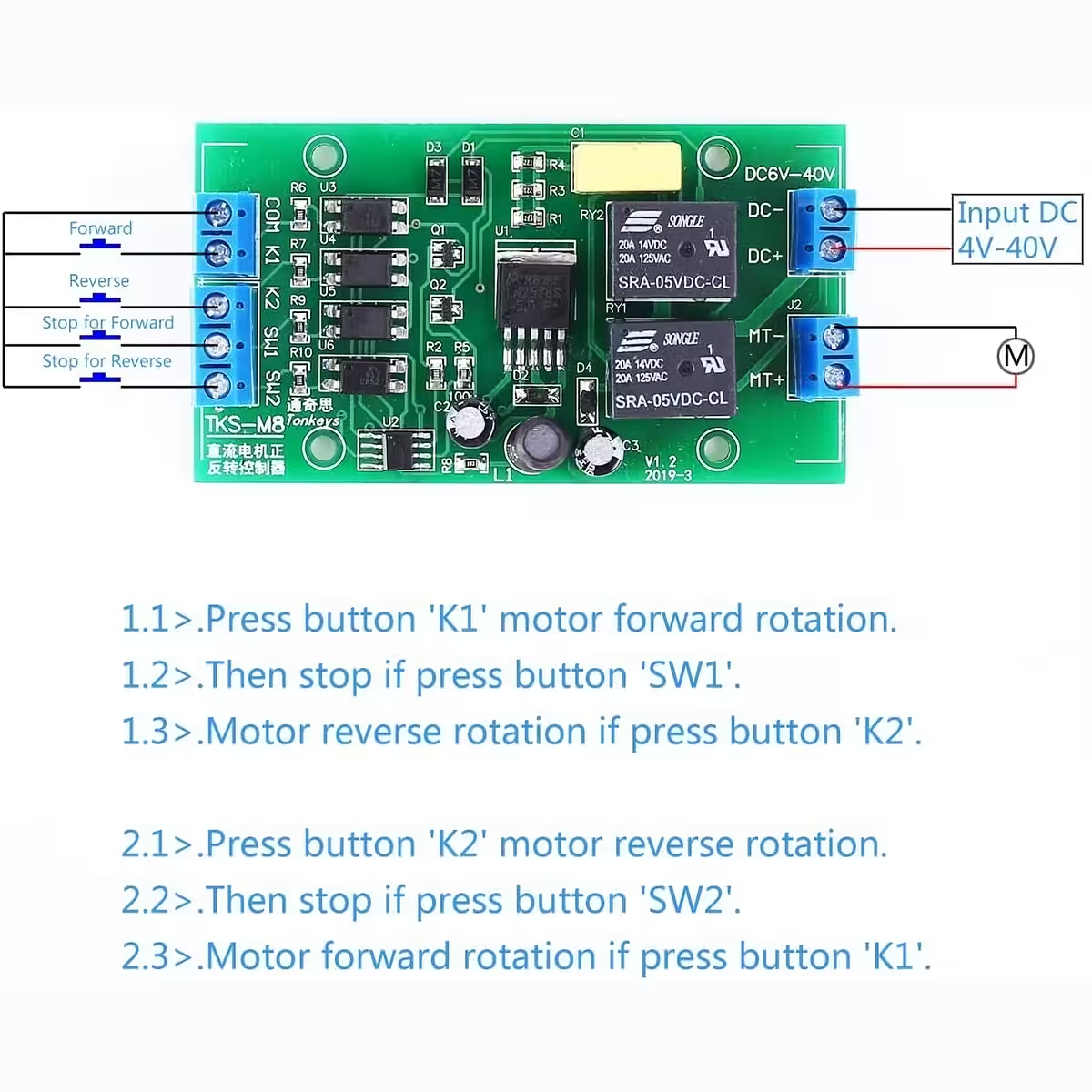
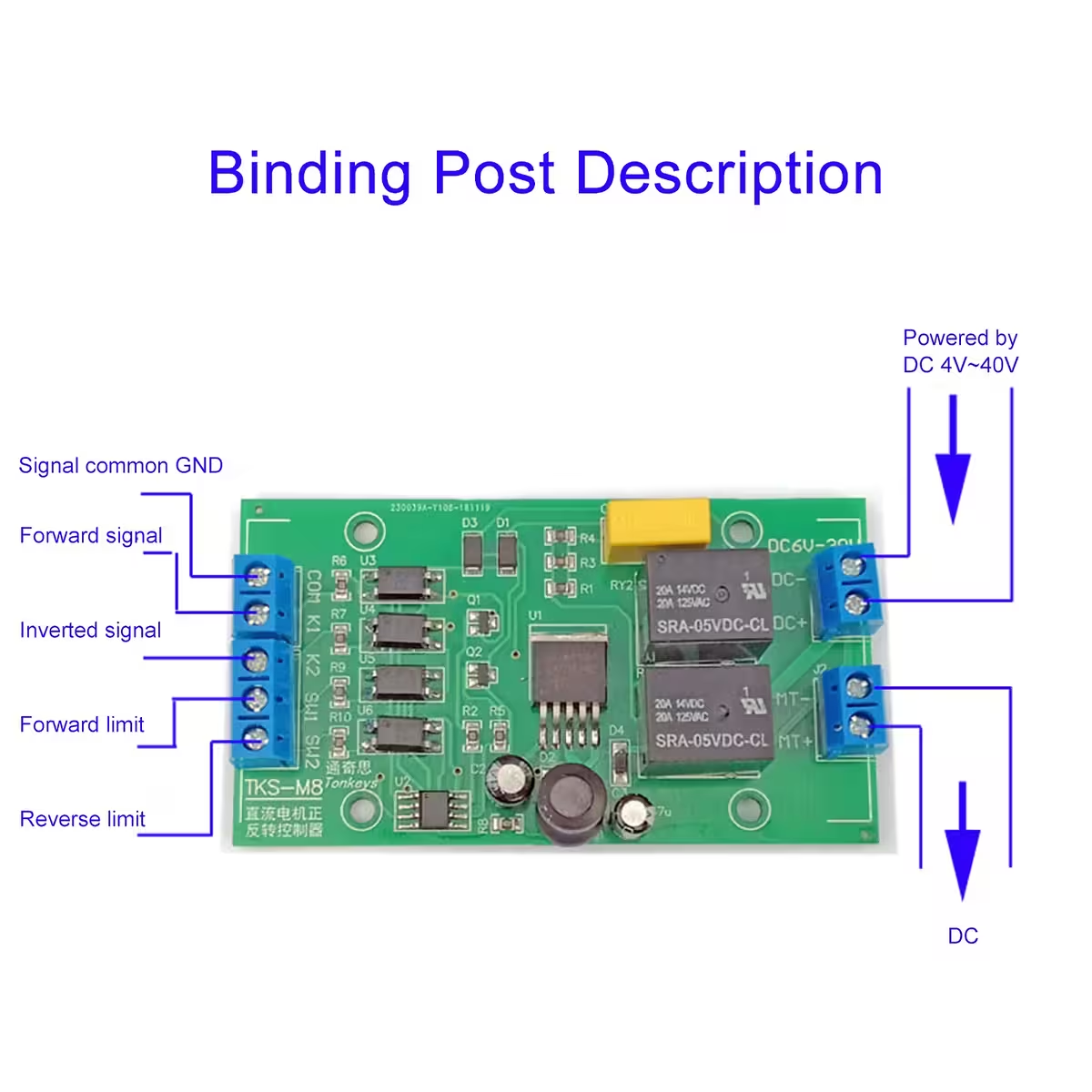
| Wejście K1 | Kierunek przód (active-low) |
| Wejście K2 | Kierunek tył (active-low) |
| SW1 | Krańcówka przód (zalecane NO) |
| SW2 | Krańcówka tył (zalecane NO) |
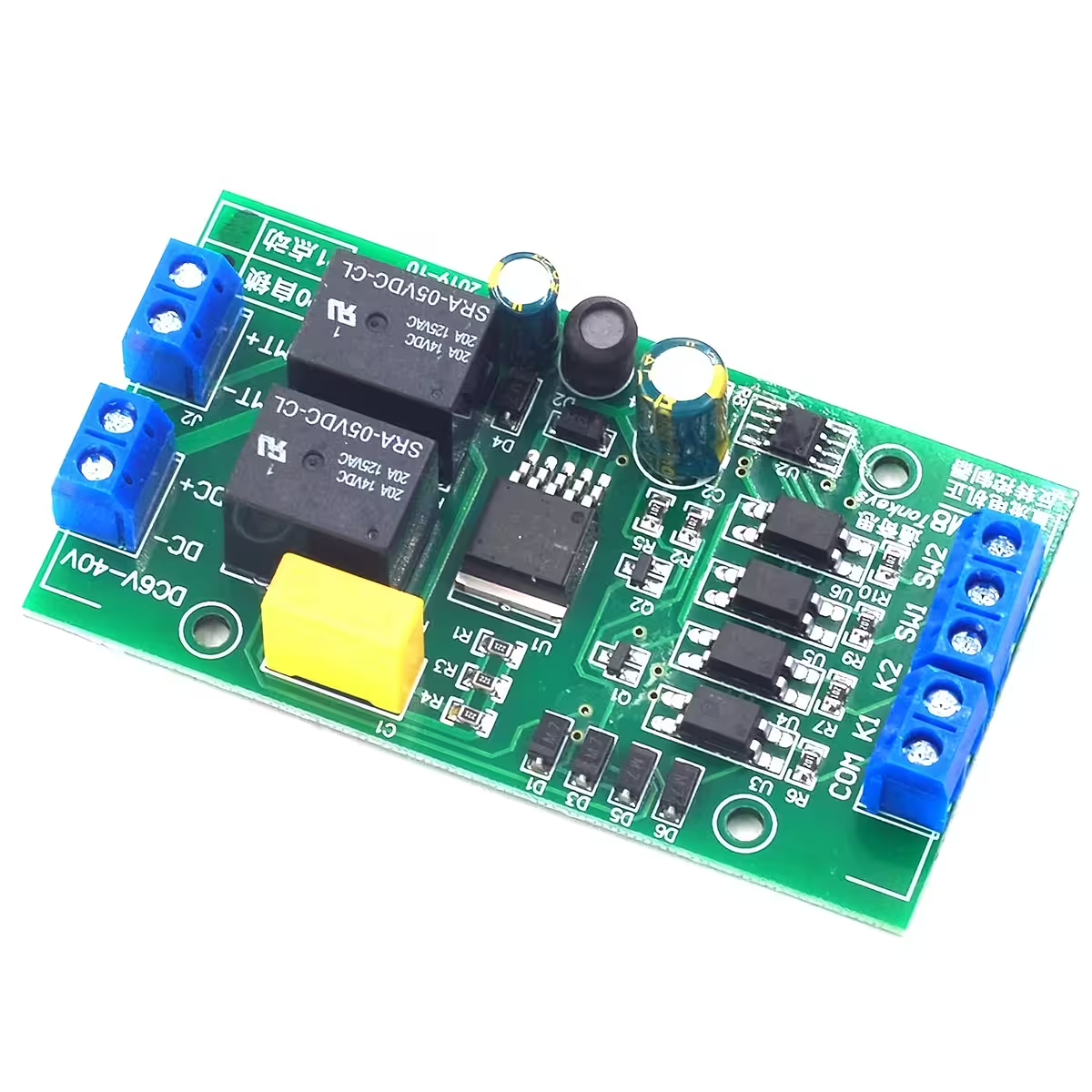
| VIN+ / VIN- | Zasilanie modułu DC 4–40V |
| Motor+ / Motor- | Wyjście na silnik DC |
Instrukcja programowania i użytkowania
Tryb PO (Samopodtrzymanie): Krótki impuls na K1 lub K2 uruchamia silnik. Pracuje on samodzielnie aż do momentu aktywacji odpowiedniej krańcówki lub otrzymania komendy przeciwnej. Idealne do automatyki.
Tryb P1 (Jog): Silnik pracuje tylko tak długo, jak długo przycisk K1 lub K2 pozostaje wciśnięty. Idealne do precyzyjnego pozycjonowania ręcznego.
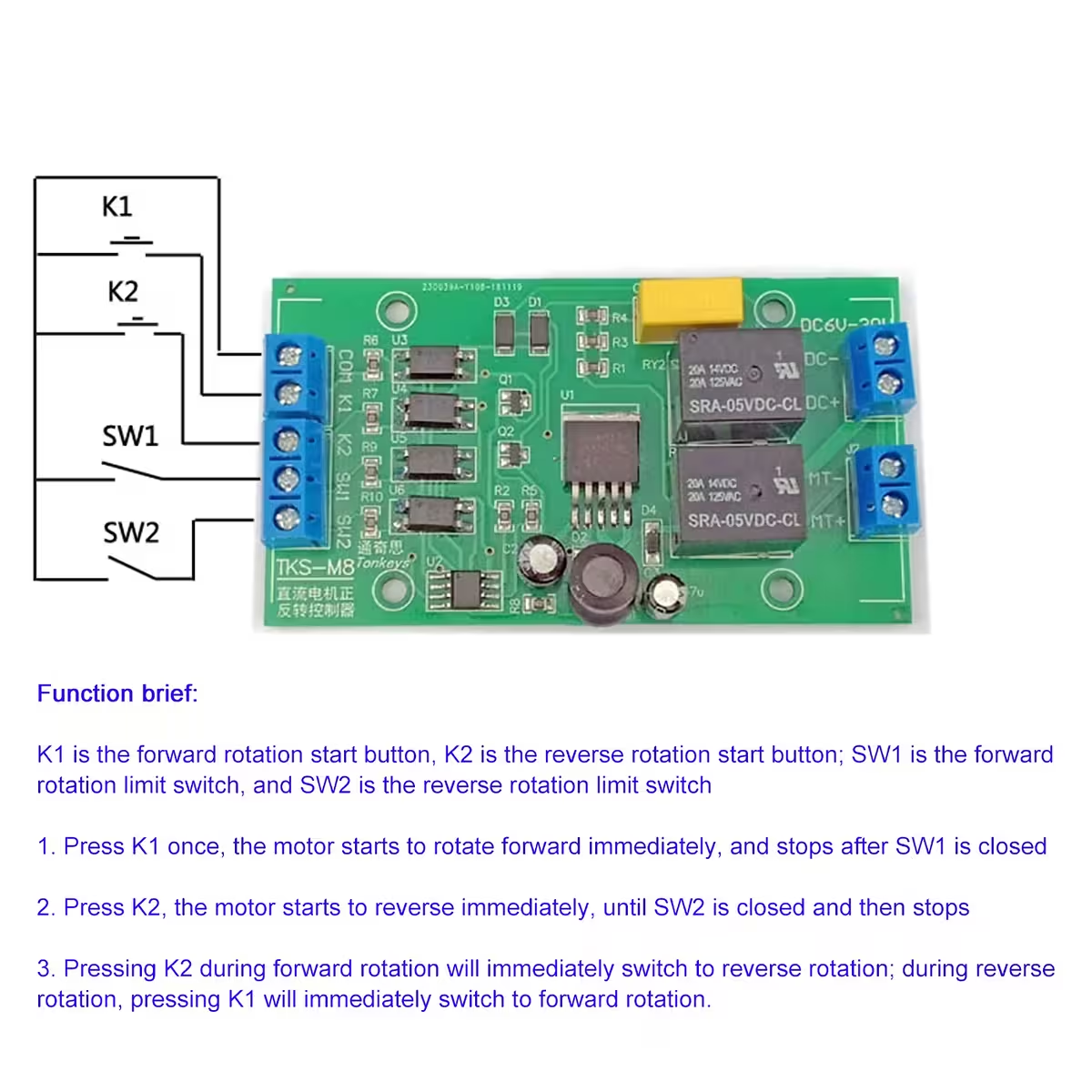
- Podłącz zasilanie do VIN+ i VIN– (zachowaj właściwą polaryzację).
- Podłącz silnik DC do Motor+ i Motor–.
- Wybierz tryb pracy: PO (samopodtrzymanie) lub P1 (jog).
- Podłącz przyciski sterujące do K1 (przód) i K2 (tył) — wejścia typu active-low.
- Opcjonalnie podłącz wyłączniki krańcowe lub czujniki NPN-NO do SW1 i SW2.
- Dla automatycznego ruchu cyklicznego A→B→A: podłącz wyjścia krańcówek NO z pozycji A do K1 oraz z pozycji B do K2, pozostawiając SW1/SW2 niepodłączone.
- Dla integracji z Arduino: połącz GND Arduino z GND sterownika, a piny cyfrowe (ustawione jako OUTPUT) z K1 i K2. Stan niski (LOW) na pinie aktywuje dany kierunek.
- Zawsze sprawdzaj prąd rozruchowy silnika i zabezpiecz obwód odpowiednim bezpiecznikiem.
Zawartość zestawu
- 1 × Sterownik kierunku silnika DC (Forward / Reverse), tryby PO/P1
Najczęściej zadawane pytania (FAQ)
Co oznacza active-low i dlaczego jest to ważne?
Wejście aktywuje się, gdy napięcie na nim spadnie poniżej 2V, czyli w momencie zwarcia do masy (GND). Dzięki temu możesz podłączyć zwykłe przyciski lub czujniki NPN bez konieczności stosowania dodatkowych rezystorów podciągających czy układów logicznych.
Jaka jest różnica między trybem PO a P1?
W trybie PO krótki impuls uruchamia silnik, który pracuje do momentu natrafienia na krańcówkę lub zmiany kierunku. W trybie P1 silnik pracuje tylko wtedy, gdy trzymasz przycisk, co pozwala na ręczne, precyzyjne sterowanie.
Czy mogę podłączyć sterownik bezpośrednio do Arduino?
Tak. Wystarczy połączyć masy (GND) obu urządzeń i użyć dwóch pinów cyfrowych Arduino ustawionych jako wyjścia. Stan niski (LOW) na pinie Arduino aktywuje odpowiedni kierunek na sterowniku.
Czy mogę użyć krańcówek typu NC (normalnie zamkniętych)?
Sterownik jest zoptymalizowany pod krańcówki NO (normalnie otwarte). Użycie typu NC odwróci logikę działania i może prowadzić do nieprawidłowej pracy systemu.
Czy przy maksymalnym prądzie wymagany jest radiator?
Przy pracy z prądem zbliżonym do 20A lub przy intensywnych cyklach pracy, zalecamy zapewnienie odpowiedniej wentylacji. W przypadku pracy ciągłej przy dużym obciążeniu, radiator lub wymuszony obieg powietrza znacząco wydłużą żywotność modułu.
Jak uzyskać automatyczny ruch cykliczny bez zewnętrznego timera?
Podłącz krańcówki NO z punktów krańcowych A i B bezpośrednio do wejść K1 i K2 (z pominięciem SW1/SW2). Po dotarciu do krańca, silnik automatycznie otrzyma sygnał do zmiany kierunku, co wymusi ciągły ruch wahadłowy.
Wideo prezentacja
Galeria zdjęć











Opinie
Na razie nie ma opinii o produkcie.